Mechanical Design
We designed our robot on the principle of modularity. Whenever possible, we wanted the components we placed on the robot to be easily replaceable should a more suitable solution be found. For this reason, components are either mounted in slot joints or with threaded fasteners for easy removal.
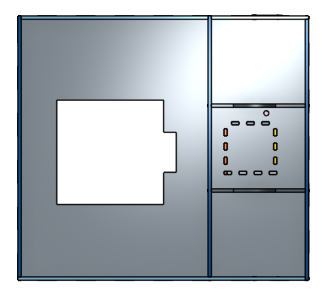
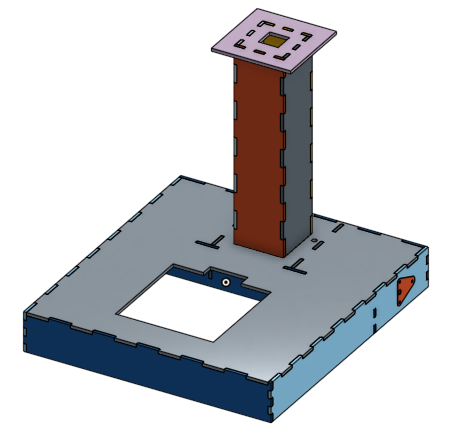
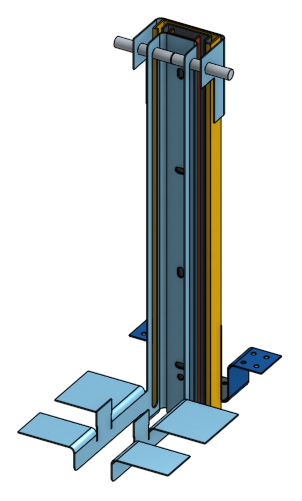
Chassis
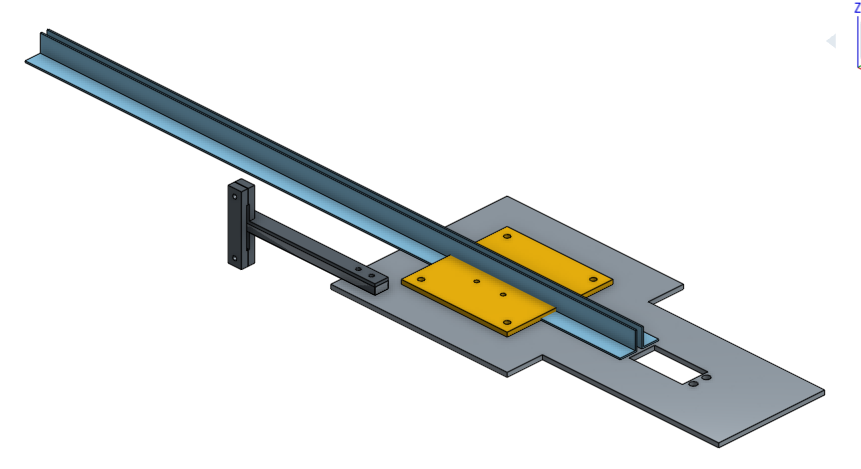
The chassis serves as a foundation for the rest of the robot. It is composed of a long square base which acts as a mounting point for motors, wiring, and the lift mechanism, as well as a 20 cm tower which supports the robot boom. The chassis is assembled entirely out of particle board, fastened with wood glue.
 |
 |
 |
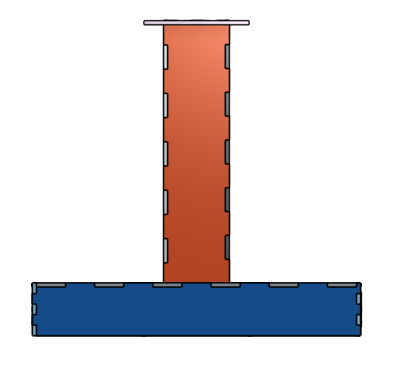 |
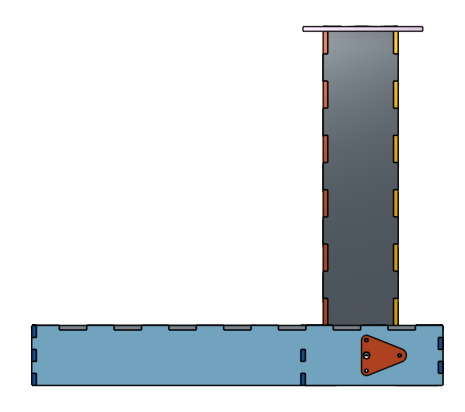
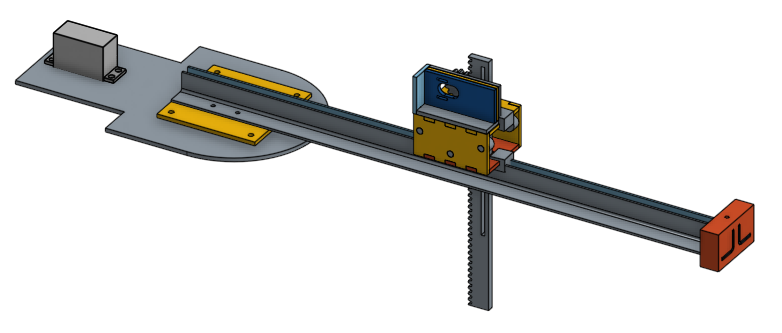
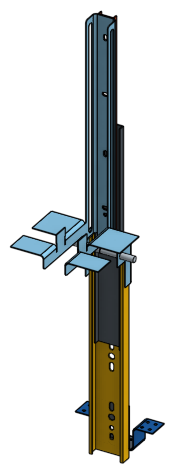
Rotating Boom
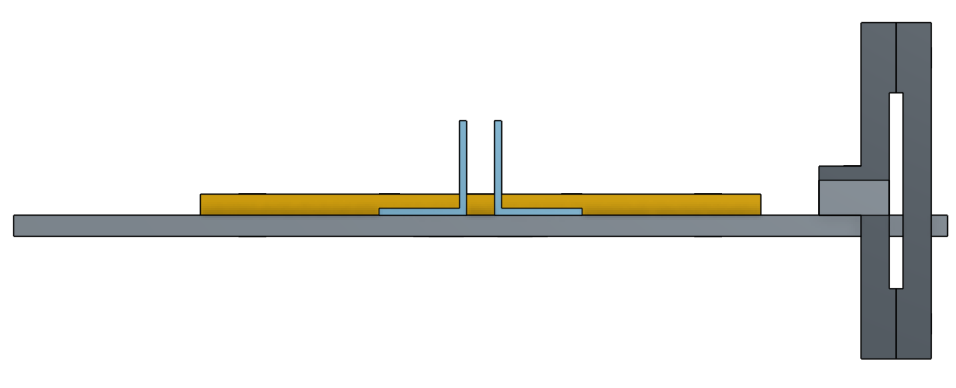
The rotating boom is the heart and soul of our robot design. It serves as a track on which our claw is able to travel back and forth on horizontally. It also has the capability of swinging out over the tub with a high degree of precision to allow for multiple types of agent retrievals. Constructed out of 1 mm aluminium at a 90° bend, it is both light and rigid, resisting moments due to the weight of the claw and the swinging action of the crane. The gap at the center of the boom allows for components to move freely up and down even through the boom, while still being supportive.
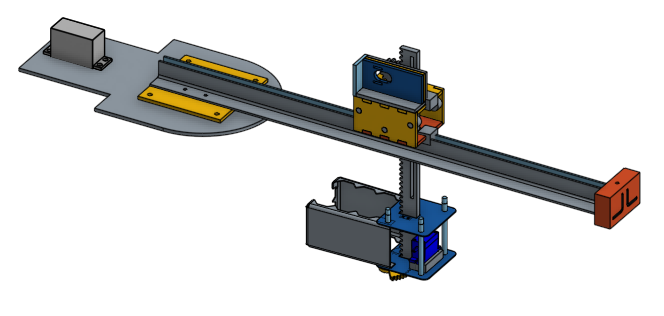
Trolley
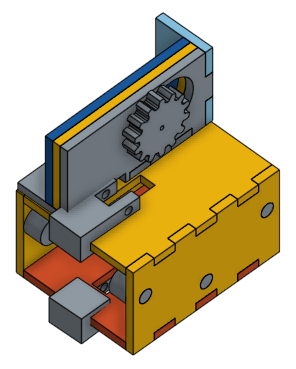
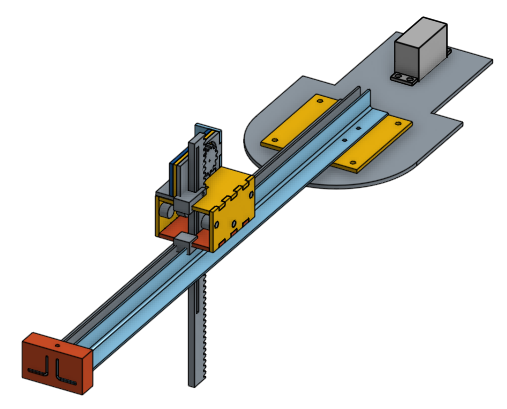
The trolley is responsible for any horizontal and vertical translation along the boom of the robot. Designed to be light, compact and roll smoothly, the trolley utilizes almost all of its outside surface as mounting area for various mechanical and electrical components, allowing the interior to house sliders and a vertically translating rack, which is attached to the claw. The trolley translates horizontally when it is moved by a belt mounted to it’s side. The trolley also controls the vertical motion of the claw via a rack and pinion attached to a motor on the trolley itself.
 |
 |
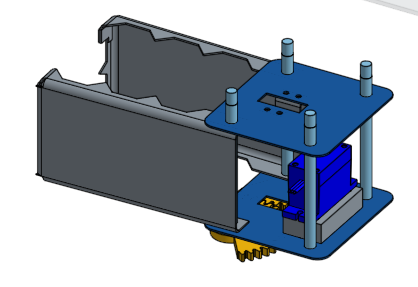
Claw Mechanism
The claw mechanism houses our claw, as well as serving as a mounting point for the rack which allows it to translate vertically and the servo which allows the claw to close. The claw is designed to open as wide as possible, and maintain multiple points of contact with the agents when closed. This allows us a larger margin of error when locating and retrieving agents, as the claw will pull agents into its grasp as it is closing.
Lift Mechanism
The lift mechanism is responsible for getting agents from the surface of the robot up onto the zipline. We use a 10” drawer slider attached to a pulley to achieve this vertical extension. There were two main considerations when designing this lift; simplicity and reliability. Our lift is consistently able to lift to the exact same height, all while only requiring a single motor, a rotating shaft and a pulley.
 |
 |