Software Design
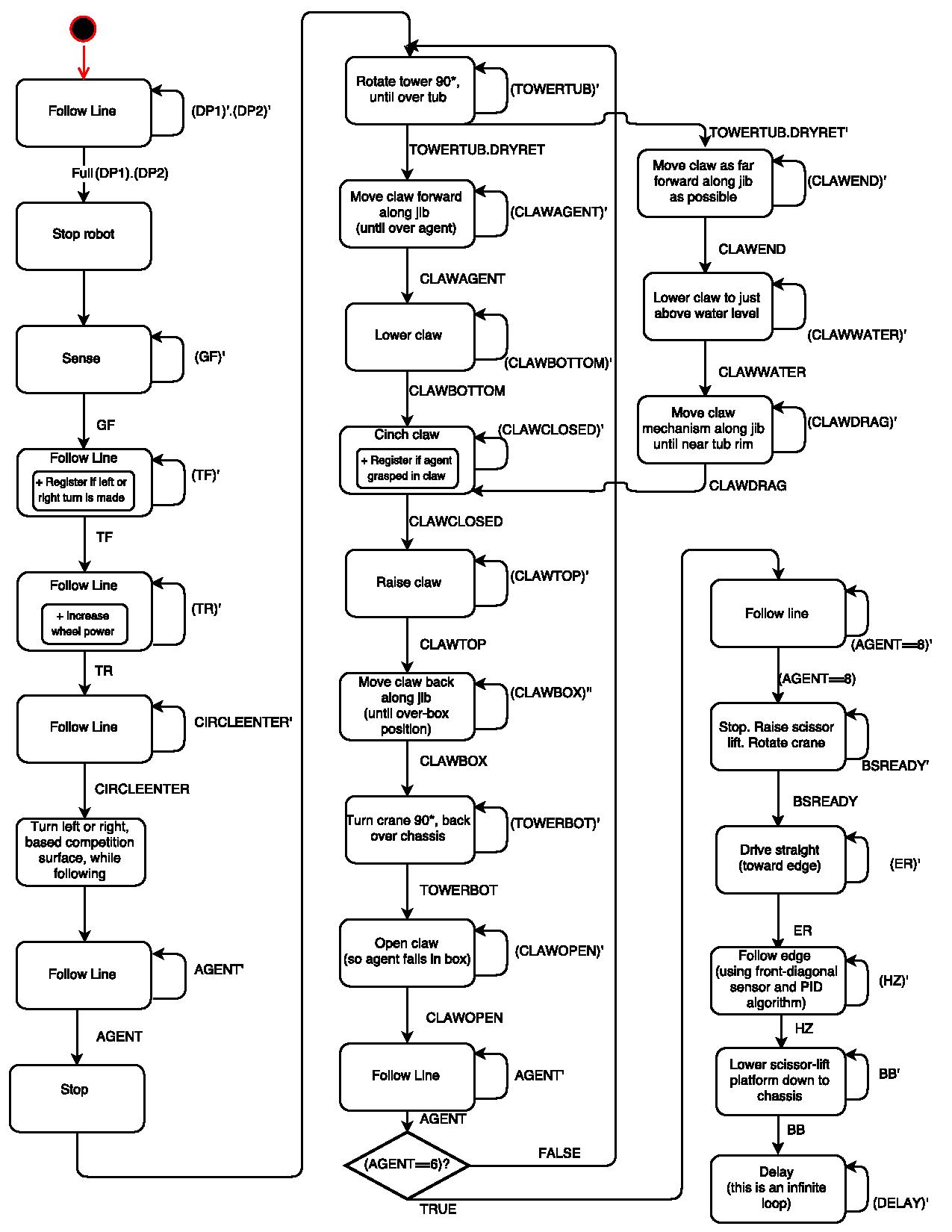
We designed our software based on a system where the robot progress through a set of states, each with a unique protocol. Our robot had 14 states, each of which handled a specific portion of the course. All software was written for Arduino, a C++ based language for microcontrollers.
- Tape follow to IR gate
- Wait for IR signal
- Tape follow (before ramp)
- Tape follow (up ramp)
- Adjust claw (at top of ramp) 6.Enter circle
- Tape follow in circle
- Retrieve agent
- Navigate circle to exit point
- Exit circle
- Lift Basket
- Approach Zipline
- Lower Basket
- Reverse and finish run
State Diagram